Dirección electromecánica de asistencia variable
En estos últimos años se esta utilizando cada vez mas este sistema de dirección, denominada dirección eléctrica. La dirección eléctrica se empezó a utilizar en vehículos pequeños (utilitarios) pero ya se esta utilizando en vehículos del segmento medio, como ejemplo: la utilizada por el Renault Megane. En este tipo de dirección se suprime todo el circuito hidráulico formado por la bomba de alta presión, depósito, válvula distribuidora y canalizaciones que formaban parte de las servodirecciones hidráulicas. Todo esto se sustituye por un motor eléctrico que acciona una reductora (corona + tornillo sinfín) que a su vez mueve la cremallera de la dirección.
Sus principales ventajas son:
- Se suprimen los componentes hidráulicos, como la bomba de aceite para servoasistencia, entubados flexibles, depósitos de aceite y filtros. Se elimina el líquido hidráulico.
- Reducción del espacio requerido, los componentes de servoasistencia van instalados y actúan directamente en la caja de la dirección. Menor sonoridad.
- Reducción del consumo energético. A diferencia de la dirección hidráulica, que requiere un caudal volumétrico permanente, la dirección asistida electromecánica solamente consume energía cuando realmente se mueve la dirección. Con esta absorción de potencia en función de las necesidades se reduce también el consumo de combustible (aprox. 0,2 L cada 100 km).
- Se elimina el complejo entubado flexible y cableado.
- El conductor obtiene una sensación óptima al volante en cualquier situación, a través de una buena estabilidad rectilínea, una respuesta directa, pero suave al movimiento del volante y sin reacciones desagradables sobre pavimento irregular.
Como se puede ver, este sistema de dirección se simplifica y es mucho mas sencillo que los utilizados hasta ahora.
Sus inconvenientes son:
- Estar limitado en su aplicación a todos los vehículos (limitación que no tiene el sistema de dirección hidráulica) ya que dependiendo del peso del vehículo y del tamaño de las ruedas, este sistema no es valido. A mayor peso del vehículo normalmente mas grandes son las ruedas tanto en altura como en anchura, por lo que mayor es el esfuerzo que tiene que desarrollar el sistema de dirección, teniendo en cuenta que en las direcciones eléctricas todo la fuerza de asistencia la genera un motor eléctrico, cuanto mayor sea la asistencia a generar por la dirección, mayor tendrá que ser el tamaño del motor, por lo que mayor será la intensidad eléctrica consumida por el mismo.
- Un excesivo consumo eléctrico por parte del motor eléctrico del sistema de dirección, no es factible, ya que la capacidad eléctrica del sistema de carga del vehículo esta limitada. Este inconveniente es el que impide que este sistema de dirección se pueda aplicar a todos los vehículos, ya que por lo demás todo son ventajas.
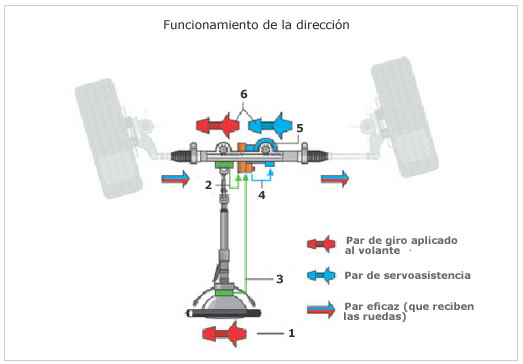
- El ciclo de servoasistencia de dirección comienza al momento en que el conductor mueve el volante.
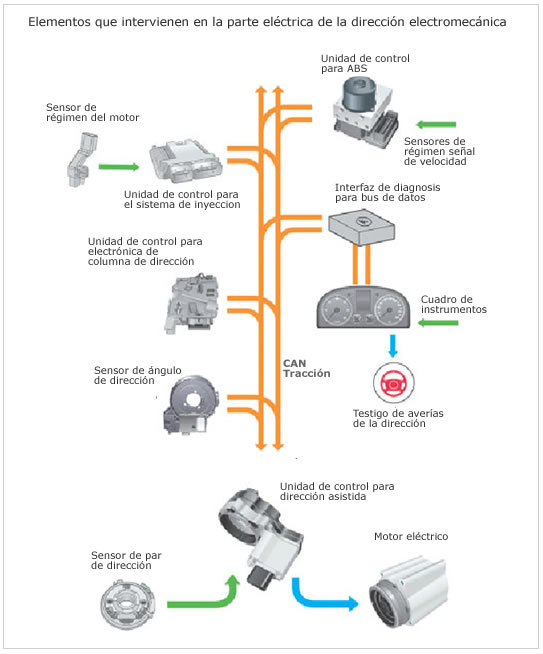
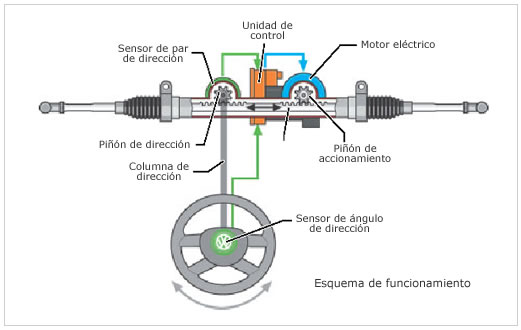
- Como respuesta al par de giro del volante se tuerce una barra de torsión en la caja de dirección. El sensor de par de dirección (situado en la caja de dirección) capta la magnitud de la torsión e informa sobre el par de dirección detectado a la unidad de control de dirección asistida.
- El sensor de ángulo de dirección, informa sobre el ángulo momentáneo y el sensor de régimen del rotor del motor eléctrico informa sobre la velocidad actual con que se mueve el volante.
- En función del par de dirección, la velocidad de marcha del vehículo, el régimen del motor de combustión, el ángulo de dirección, la velocidad de mando de la dirección y las curvas características implementadas en la unidad de control, ésta calcula el par de servoasistencia necesario para el caso concreto y excita correspondientemente el motor eléctrico.
- La servoasistencia a la dirección se realiza a través de un segundo piñón que actúa paralelamente sobre la cremallera. Este piñón es accionado por un motor eléctrico. El motor ataca hacia la cremallera a través de un engranaje de sin fin y un piñón de accionamiento y transmite así la fuerza de asistencia para la dirección.
- La suma compuesta por el par de giro aplicado al volante y el par de servoasistencia constituye el par eficaz en la caja de dirección para el movimiento de la cremallera.
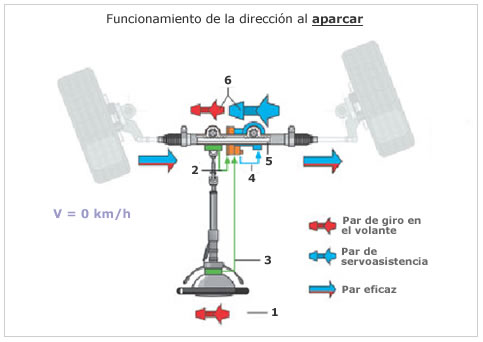
- El conductor gira bastante el volante para poder aparcar.
- La barra de torsión se tuerce. El sensor del par de dirección detecta la torsión e informa a la unidad de control de que se está aplicando al volante un par de dirección intenso.
- El sensor de ángulo de dirección avisa que hay un ángulo de dirección pronunciado y el sensor de régimen del rotor informa sobre la velocidad del mando actual de la dirección.
- Previo análisis de las magnitudes correspondientes al par de dirección, la velocidad de marcha del vehículo de 0 km/h, el régimen del motor de combustión, el pronunciado ángulo de dirección, la velocidad de mando de la dirección y, en función de las curvas características implementadas en la unidad de control para v = 0 km/h, la unidad de control determina la necesidad de aportar un intenso par de servoasistencia y excita correspondientemente el motor eléctrico.
- En las maniobras de aparcamiento se aporta de ese modo la servoasistencia máxima para la dirección a través del segundo piñón que actúa paralelamente sobre la cremallera.
- La suma del par aplicado al volante y el par de servoasistencia máximo viene a ser el par eficaz en la caja de dirección para el movimiento de la cremallera en maniobras de aparcamiento.
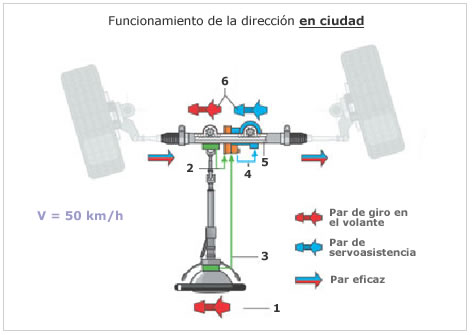
- El conductor mueve el volante al recorrer una curva en tráfico urbano.
- La barra de torsión se tuerce. El sensor de par de dirección detecta la torsión y avisa a la unidad de control de que hay un par de dirección, de mediana intensidad, aplicado al volante de la dirección.
- El sensor de ángulo de dirección avisa que hay un ángulo de dirección de mediana magnitud y el sensor de régimen del rotor informa sobre la velocidad momentánea con que se mueve el volante.
- Previo análisis del par de dirección de mediana magnitud, la velocidad de marcha del vehículo de 50 km/h, el régimen del motor de combustión, un ángulo de dirección de mediana magnitud y la velocidad con que se mueve el volante, así como en función de las curvas características implementadas en la unidad de control para v = 50 km/h, la unidad de control determina la necesidad de aportar un par de servoasistencia de mediana magnitud y excita correspondientemente el motor eléctrico.
- Al recorrer una curva se produce así una servoasistencia de mediana magnitud para la dirección a través del segundo piñón, que actúa paralelamente sobre la cremallera.
- La suma compuesta por el par de giro aplicado al volante y el par de servoasistencia de mediana magnitud viene a ser el par eficaz en la caja de la dirección para el movimiento de la cremallera al recorrer una curva en el tráfico urbano.
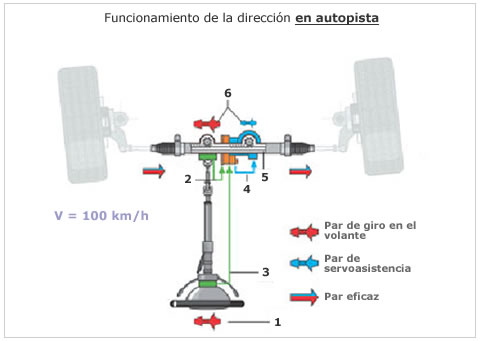
- Al cambiar de carril, el conductor mueve el volante en pequeña magnitud.
- La barra de torsión se tuerce. El sensor de par de dirección detecta la torsión y avisa a la unidad de control de que está aplicado un leve par de dirección al volante.
- El sensor de ángulo de dirección avisa que está dado un pequeño ángulo de dirección y el sensor de régimen del rotor avisa sobre la velocidad momentánea con que se acciona el volante.
- Previo análisis del par de dirección de baja magnitud, la velocidad de marcha del vehículo de 100 km/h, el régimen del motor de combustión, un pequeño ángulo de dirección y la velocidad con que se acciona el volante, y en función de las curvas características implementadas en la unidad de control para v = 100 km/h, la unidad de control determina la necesidad de aportar ya sea un par de dirección leve o no aportar ningún par de dirección, y excita correspondientemente el motor eléctrico.
- Al mover la dirección circulando en autopista se realiza de esta forma la servoasistencia de baja magnitud o bien no se aporta ninguna servoasistencia a través del segundo piñón que actúa paralelamente sobre la cremallera.
- La suma compuesta por el par de giro aplicado al volante y un mínimo par de servoasistencia viene a ser el par eficaz para el movimiento de la cremallera en un cambio de carril.
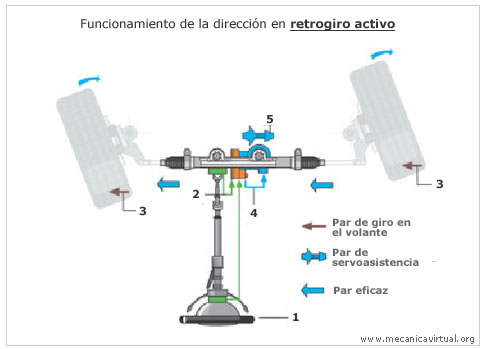
- Si el conductor reduce el par de dirección al circular en una curva, la barra de torsión se relaja correspondientemente.
- En combinación con el descenso del par de dirección, teniendo en cuenta el ángulo de dirección y la velocidad con que se acciona el volante, el sistema calcula una velocidad teórica para el retrogiro y la compara con la velocidad de mando de la dirección. De ahí se calcula el par de retrogiro.
- La geometría del eje hace que se produzcan fuerzas de retrogiro en las ruedas viradas. Las fricciones en el sistema de la dirección y del eje suelen hacer que las fuerzas de retrogiro sean demasiado bajas como para poder devolver las ruedas a su posición de marcha recta.
- Previo análisis del par de dirección, la velocidad de marcha del vehículo, el régimen del motor de combustión, el ángulo de dirección y la velocidad con que se gira el volante, así como en función de las curvas características implementadas en la unidad de control, ésta calcula el par que debe aportar el motor eléctrico para el retrogiro de la dirección.
- El motor es excitado correspondientemente y las ruedas vuelven a la posición de marcha recta.
- La corrección de marcha recta es una función que se deriva del retrogiro activo. Aquí se genera un par de servoasistencia para que el vehículo vuelva a la marcha rectilínea exenta de momentos de fuerza. El sistema distingue entre un algoritmo de corto y uno de largo plazo.
- El algoritmo de largo plazo está dedicado a compensar las discrepancias a largo plazo que surgen con respecto a la marcha rectilínea, por ejemplo debido al cambio de neumáticos de verano por neumáticos de invierno (usados).
- El algoritmo de corto plazo corrige discrepancias de duración breve. Con ello se respalda al conductor, evitando que por ejemplo tenga que «contravolantear» continuamente al circular habiendo viento lateral constante.
- Una fuerza lateral constante, por ejemplo la del viento lateral, actúa sobre el vehículo.
- El conductor tuerce un poco el volante, para mantener el vehículo en marcha recta.
- Analizando el par de dirección, la velocidad de marcha del vehículo, el régimen del motor de combustión, el ángulo de dirección, la velocidad de mando de la dirección y actuando en función de las curvas características implementadas en la unidad de control, ésta calcula el par que debe aportar el motor eléctrico para la corrección de la marcha recta.
- El motor eléctrico de la dirección es excitado correspondientemente. El vehículo adopta la trayectoria de marcha recta. El conductor ya no tiene que dar «contravolante».
Estructura y componentes
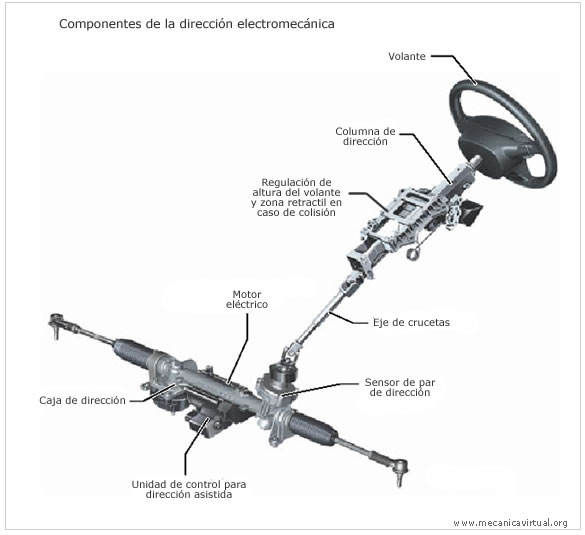
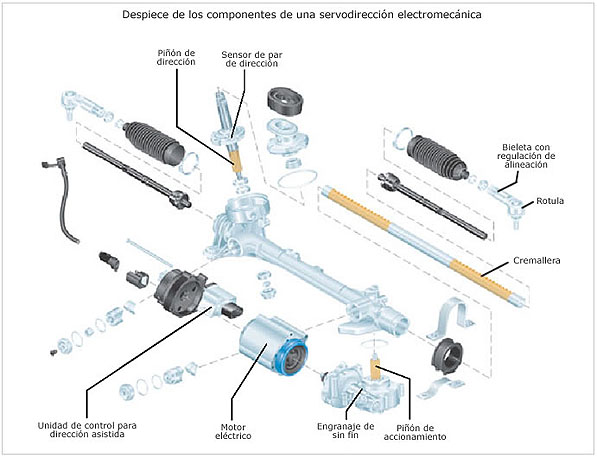
En la dirección asistida electromecánica cuenta con doble piñón. Se aplica la fuerza necesaria para el mando de la dirección a través de uno de los piñones llamado "piñón de dirección" y a través del otro piñón llamado "piñón de accionamiento". El piñón de dirección transmite los pares de dirección aplicados por el conductor y el piñón de accionamiento transmite, a través de un engranaje de sin fin, el par de servoasistencia del motor eléctrico para hacer el gobierno de la dirección mas fácil. Este motor eléctrico con unidad de control y sistema de sensores para la servoasistencia de la dirección va asociado al segundo piñón. Con esta configuración está dada una comunicación mecánica entre el volante y la cremallera. De esa forma se sigue pudiendo dirigir mecánicamente el vehículo en caso de averiarse el servomotor.
Funcionamiento
Funcionamiento de la dirección al aparcar
Funcionamiento de la dirección circulando en ciudad
Funcionamiento de la dirección circulando en autopista
Funcionamiento de la dirección en "retrogiro activo"
Funcionamiento corrección de marcha recta
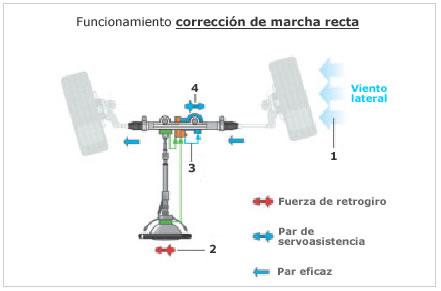
Diagrama de los elementos que intervienen en la gestión electrónica de la dirección electromecánica